зіDOEЩшМЦЕФШЫЃЌДѓИХТЪЖМОРњЙ§етбљвЛИіЫВМфЃК
ЫуЗЈХмЭъСЫЃЌЯрЮЛЭМвВГіРДСЫЃЌЮФМўМаРяАВАВОВОВЬЩзХвЛеХ“ПДЦ№РДКмЯёФЧУДЛиЪТ”ЕФШЋЯЂЯрЮЛЭМЁЃетИіЪБКђЃЌзюШУШЫЩЯЭЗЕФЮЪЬтОЭРДСЫ——етеХЭМЃЌецЕФФмДђТ№ЃП
ЫќЕНЕзФмВЛФмАбЙтећаЮГЩЮвЯывЊЕФбљзгЃП ЫќдкФПБъУцЩЯЕНЕзЛсВЛЛсаЮГЩЩшМЦжаЕФЙтАпЃП ЫќЪЧ“РэТлЩЯПЩаа”ЃЌЛЙЪЧ“ЪЕМЪЩЯЗГЕ”ЃП ШчЙћжБНгФУШЅМгЙЄЃЌзюКѓЛсВЛЛсЛЈСЫЧЎЁЂЕШСЫжмЦкЃЌНсЙћГіРДвЛПДЃКВЛЖдОЂЃП
ЫЕАзСЫЃЌDOEЩшМЦРязюХТЕФЃЌДгРДЖМВЛЪЧУЛгаЯрЮЛЭМЃЌЖјЪЧФуЪжРяУїУївбОгаСЫЯрЮЛЭМЃЌШДВЛжЊЕРЫќЕНЕзППВЛППЦзЁЃ
ЫљвдНёЬьетЦЊЃЌЮвЯыЗжЯэвЛИіЬиБ№ЪЕгУЁЂвВЬиБ№ЪЪКЯЙЄГЬГЁОАЕФЗНЗЈЃКдѕУДгУ VirtualLab Fusion РяЕФ Data-Defined Transimission(CF-TRAN01)ЃЌАбвЛеХЩшМЦКУЕФЯрЮЛЭМЃЌеце§БфГЩПЩбщжЄЕФDOEФЃаЭЃЌВЂЧвдкМгЙЄжЎЧАЃЌЯШАбНсЙћПДУїАзЁЃ
етДЮЮвУЧВЛНВЬиБ№ИДдгЕФДѓЯЕЭГЃЌОЭФУвЛИіЗЧГЃЕфаЭЁЂвВЗЧГЃгаДњБэадЕФАИР§РДНВЃКбщжЄвЛИі 3×3 ЗжЪјDOE ЕФећаЮаЇЙћЁЃ
ШчЙћФуе§дкзіDOEЩшМЦЃЌЛђепФуЪжЩЯвбОгаЯрЮЛЭМСЫЃЌЕЋЛЙВЛжЊЕРИУдѕУДбщжЄЃЌетЦЊЛљБОПЩвджБНгФУШЅеезХзіЁЃ
вЛЁЂЮЊЪВУДDOEЩшМЦвЛЖЈвЊЯШбщжЄЃП
ЯШЫЕвЛИіЬиБ№ЯжЪЕЕФЮЪЬтЁЃКмЖрЪБКђЃЌЮвУЧзіDOEЩшМЦЕФСїГЬЖМЪЧетбљЕФЃК ЯШЩшЖЈФПБъЙтГЁЃЌШЛКѓЭЈЙ§ЕќДњЫуЗЈЁЂгХЛЏЗНЗЈЛђепЦфЫћЩшМЦЪжЖЮЃЌзюКѓЕУЕНвЛеХЯрЮЛЭМЁЃЕНетРяЃЌКмЖрШЫЛсЯТвтЪЖОѕЕУЃЌЙЄзїЭъГЩЕУВюВЛЖрСЫЁЃЕЋЪЕМЪЩЯЃЌеце§ЮЃЯеЕФЕиЗНЃЌЭљЭљЧЁЧЁОЭдкетжЎКѓЁЃвђЮЊЯрЮЛЭМЩшМЦЭъГЩКЭзюжеЙтГЁжиНЈе§ШЗжЎМфЃЌВЂВЛФмжБНгЛЕШКХЁЃжаМфЛЙИєзХКмЖрПгЃЌБШШчЃК
ЯрЮЛЛвЖШКЭецЪЕЯрЮЛЕФгГЩфгаУЛгаИуЖдЃП ЕМШыШэМўжЎКѓЃЌЮяРэСПЪЧВЛЪЧЩшжУДэСЫЃП ДЋВЅОрРыЪЧВЛЪЧКЭЩшМЦЙЄПівЛжТЃП СЌајЯрЮЛвЛЕЉБфГЩЖрЬЈНзЃЌаЇЙћЛсВЛЛсЕєЕУКмРїКІЃП ФПБъЕуеѓгаУЛгаГіРДЃП ГіРДСЫжЎКѓОљдШадКУВЛКУЃП гаУЛгавЛЖбдгЩЂЙтКЭЙэЯёЃП
етаЉЮЪЬтЃЌШчЙћВЛЬсЧАбщжЄЃЌзюКѓОЭКмШнвзбнБфГЩвЛОфЪьЯЄЕФЛАЃК
“ЩшМЦЕФЪБКђИаОѕУЛЮЪЬтАЁЁЃ”
ЕЋЙтбЇЯЕЭГетЖЋЮїЃЌзюВЛШЯИаОѕЁЃгШЦфDOEетжжЦїМўЃЌБОЩэОЭЖдЯрЮЛЕїжЦЁЂВЩбљЁЂСПЛЏЁЂДЋВЅЬѕМўЖМЗЧГЃУєИаЁЃФужЛвЊгавЛИіЛЗНкРэНтЦЋСЫЁЂгГЩфДэСЫЃЌзюКѓГіРДЕФНсЙћОЭПЩФмКЭдЄЦкВюКмдЖЁЃЫљвдЖдDOEРДЫЕЃЌЗТецбщжЄВЛЪЧгаПеПЩвдзівЛЯТЃЌЖјЪЧзюКУдкМгЙЄЧАБиаызіЁЃЫќзюДѓЕФМлжЕЃЌВЛжЛЪЧШУФуПДвЛеХНсЙћЭМЃЌЖјЪЧШУФудкеце§ЛЈЧЎЁЂЛЈЪБМфСїЦЌжЎЧАЃЌЯШХаЖЯетЬѕТЗЕНЕзжЕВЛжЕЕУзпЁЃ
ЖўЁЂетИіАИР§вЊНтОіЪВУДЮЪЬтЃП
етДЮЮвУЧбщжЄЕФЪЧвЛИіКмОЕфЕФDOEШЮЮёЃКАбвЛЪјИпЫЙЙтЃЌећаЮГЩвЛИі 3×3 ЕФЕуеѓЁЃШЮЮёБОЩэВЛИДдгЃЌЕЋЬиБ№ЪЪКЯФУРДНВЧхГўбщжЄЫМТЗЁЃ
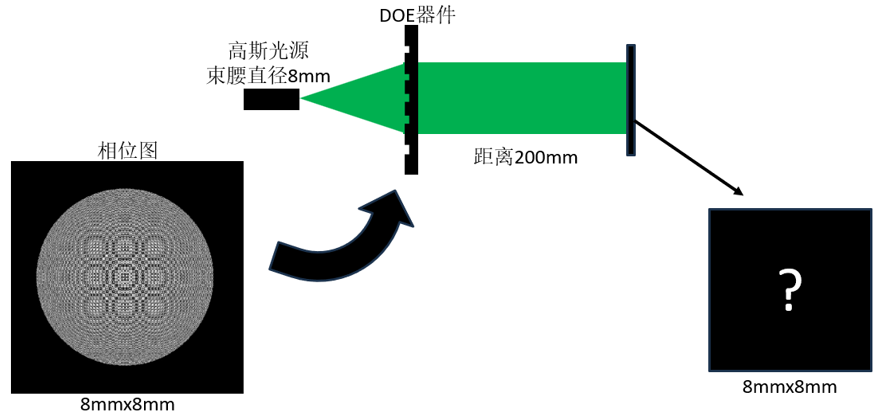
ШчЭМ1ЫљЪОЃЌЯЕЭГВЮЪ§ШчЯТЃКЙтдДЪЧИпЫЙЙтдД ЪјбќжБОЖ 8 mmЃЌвВОЭЪЧЪјбќАыОЖ 4 mm ВЈГЄ 532 nm DOEЦїМўГпДч 8 mm × 8 mm ФПБъЦНУцЮЛгкDOEКѓЗН 200 mm ФПБъЪЧПДФПБъУцЩЯФмВЛФмЕУЕН 3×3 ЕуеѓЗжВМ
ЭМ1. 532nmМЄЙт3×3ЗжЪјDOEНЈФЃШЮЮё
етИіАИР§КУОЭКУдкЃЌЫќЗЧГЃЯёецЪЕЯюФПРяЕФвЛИізюаЁБеЛЗЁЃгаЪфШыЙтЃЛ гаЩшМЦКУЕФЯрЮЛЭМЃЛ гаDOEЦїМўЃЛ гаДЋВЅОрРыЃЛ гаФПБъЙлВьУцЃЛ зюКѓЛЙгавЛИіУїШЗЕФЮЪЬтЃКЕНЕзгаУЛгаЪЕЯжЗжЪјЃПШчЙћФуАбетИіАИР§ГдЭИСЫЃЌКѓУцВЛЙмФузіЕФЪЧЖўЮЌЕуеѓЁЂЦНЖЅЙтАпЁЂЬиЪтЭМаЮЭЖгАЃЌЛЙЪЧИќИДдгЕФЙтЪјећаЮЃЌЛљБОТпМЖМЪЧЭЈЕФЁЃ
Ш§ЁЂData-Defined Transimission(CF-TRAN01) ЕНЕзКУгУдкФФЃП
Data-Defined Transimission(CF-TRAN01)БОжЪЩЯОЭЪЧвЛИі“АбЭтВПЖЈвхКУЕФЙтбЇЕїжЦКЏЪ§ЃЌеце§МгдиНјЯЕЭГРяВЮгыМЦЫу”ЕФЙЄОпЁЃЮвУЧдкDOEЩшМЦРяГЃМћЕФЪфГіаЮЪНЪЧЪВУДЃП ЭљЭљОЭЪЧвЛеХЯрЮЛЭМЁЃЮЪЬтЪЧЃЌетеХЯрЮЛЭМБОЩэжЛЪЧвЛИіЮФМўЃЌЫќВЛЛсздМКВЮгыЙтДЋВЅЁЃФуЕУЯШЯыАьЗЈАбЫќБфГЩвЛИі“гаЮяРэвтвхЕФЦїМў”ЃЌШэМўВХФмФУЫќШЅЕїжЦШыЩфЙтГЁЁЃData-Defined Transimission(CF-TRAN01) ЕФзїгУЃЌЧЁЧЁОЭЪЧАбетМўЪТНгЦ№РДЁЃ
ЫќВЛЪЧШУФужиаТДгСуЖЈвхИДдгЕФЙЋЪНЃЌвВВЛЪЧБЦФуЪжЙЄвЛИіЯёЫивЛИіЯёЫиЕиДюНЈDOEНсЙЙЃЌЖјЪЧдЪаэФуАбвбгаЕФЯрЮЛНсЙћЕМШыНјРДЃЌзЊГЩЭИЙ§ТЪКЏЪ§ЃЌдйШУетИіКЏЪ§еце§зїгУдкЙтЪјЩЯЁЃ
ЖдЙЄГЬШЫдБРДЫЕЃЌетИіЗНЪНецЕФКмгбКУЁЃ
вђЮЊЪЕМЪЙЄзїжаЃЌКмЖрЪБКђЮвУЧзюВЛШБЕФЪЧЩшМЦНсЙћЃЌзюШБЕФЪЧАбЩшМЦНсЙћПьЫйБфГЩбщжЄФЃаЭЕФФмСІЁЃData-Defined Transimission(CF-TRAN01) ИеКУАбетвЛВНИјВЙЩЯСЫЁЃИќживЊЕФЪЧЃЌЫќЛЙВЛжЛЪЧФмбщжЄРэЯыСЌајЯрЮЛЁЃФуЩѕжСПЩвдНјвЛВНзіЖрЬЈНзСПЛЏЃЌШЅПДЪЕМЪМгЙЄжЎКѓаЇЙћЛсВЛЛсУїЯдБфВюЁЃ
етвЛЕуЗЧГЃЙиМќЁЃвђЮЊКмЖрDOEдкЩшМЦНзЖЮЖМКмЦЏССЃЌЗТЗ№ЬьЯТЮоЕаЃЛвЛЕЉПМТЧЙЄвеЬЈНзЪ§ЁЂЪЕМЪжЦдьОЋЖШЃЌНсЙћТэЩЯОЭПЊЪМ“ЕєбЊ”ЁЃШчЙћФужЛПДРэЯыЯрЮЛЃЌВЛПДСПЛЏНсЙћЃЌФЧКмЖрЪБКђФубщжЄГіРДЕФЪЧ“РэТлКУПД”ЃЌВЛЪЧ“ЙЄГЬПЩзі”ЁЃ
ЫФЁЂетИіАИР§ОпЬхдѕУДзіЃП
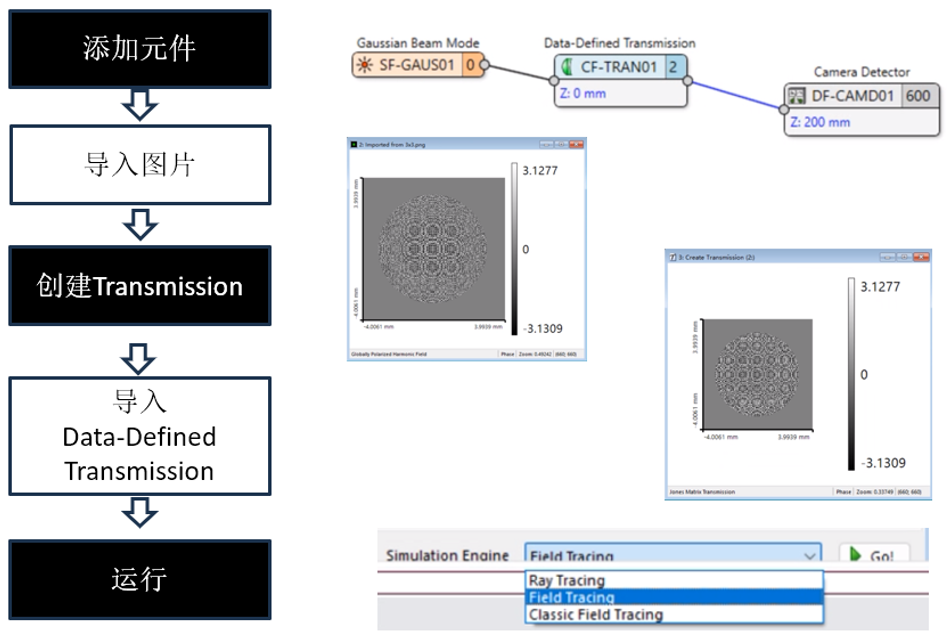
ећИіСїГЬЦфЪЕВЛИДдгЃЌзмЙВПЩвдЗжГЩЮхВНЃЌШчЭМ2ЫљЪОЁЃеце§зівЛБщжЎКѓФуЛсЗЂЯжЃЌЫќБШКмЖрШЫЯыЯѓжавЊжБЙлЕУЖрЁЃ
ЭМ2. Data-Defined TransmissionЪЙгУжИФЯ
ЕквЛВНЃЌЯШАбЯЕЭГЙЧМмДюЦ№РД
дкЙтТЗБрМЦїРяЃЌЯШМгШ§ИідЊМўЃКИпЫЙЙтдД | Data-Defined Transimission(CF-TRAN01) | ЬНВтЦї
етОЭЪЧзюЛљБОЕФздгЩПеМфДЋВЅСДТЗЃК ЙтдДЗЂЙтЃЌОЙ§DOEЕїжЦЃЌзюКѓдкФПБъЦНУцЩЯПДНсЙћЁЃ
ШЛКѓАбЙиМќВЮЪ§ЩшКУЃКИпЫЙЙтдДЪјбќАыОЖЩшЮЊ 4 mm ВЈГЄЩшЮЊ 532 nm ЬНВтЦїКЭ Data-Defined Transimission(CF-TRAN01) ЕФОрРыЩшЮЊ 200 mmЁЃетвЛВНЫфШЛМђЕЅЃЌЕЋОјЖдВЛФмТэЛЂЁЃгШЦфЪЧДЋВЅОрРыЃЌКмЖрЪБКђНсЙћВЛЖдЃЌВЛЪЧвђЮЊDOEВЛааЃЌЖјЪЧвђЮЊФуАбЬНВтУцЗХДэСЫЁЃDOEЩшМЦЭЈГЃЪЧеыЖдЬиЖЈФПБъЦНУцЭъГЩЕФЃЌФуВтЕФЮЛжУВЛЖдЃЌПДЕНЕФздШЛвВВЛЪЧФПБъЭМбљЁЃЫљвдетРяЕФТпМКмМђЕЅЃКЩшМЦдкФФЖљГЩЯёЃЌФуОЭдкФФЖљПДЁЃ
ЕкЖўВНЃЌАбЯрЮЛЭМЕМНјРДЁЃ
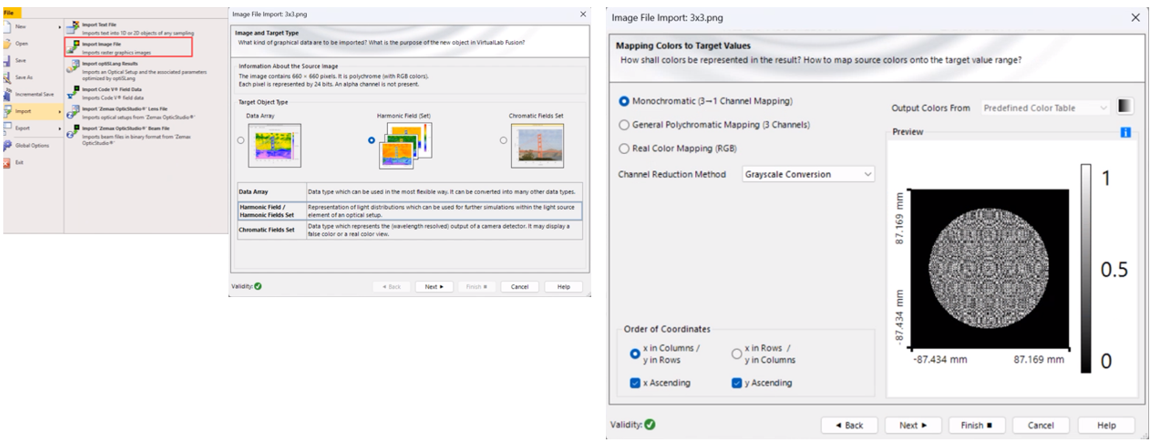
ЭМ3. ЕМШыЯрЮЛЭМДДНЈHarmonic Field
НгЯТРДЃЌШчЭМ3ЫљЪОЃЌЕМШыЩшМЦКУЕФЯрЮЛЭМЁЃетРяЬиБ№НЈвщгУЛвЖШЭМЁЃдвђКмЯжЪЕЃКЛвЖШЭМзюЪЪКЯзїЮЊЯрЮЛгГЩфЕФдиЬхЃЌЕМШыЕФЪБКђИќЧхЮњЃЌвВИќШнвзПижЦЮяРэСПЖдгІЙиЯЕЁЃдкЕМШыЪБЃЌВЛЪЧМђЕЅАбЫќЕБГЩвЛеХЭМЯдЪОГіРДЃЌЖјЪЧвЊбЁдёДДНЈ Harmonic FieldЃЌВЂАбЮяРэСПЩшжУГЩ“ЯрЮЛ”ЁЃетвЛВНЗЧГЃЙиМќЃЌЩѕжСПЩвдЫЕОіЖЈСЫКѓУцНсЙћЕНЕзгаУЛгавтвхЁЃвђЮЊДЫЪБШэМўВЂВЛЪЧдкПДетеХЭМГЄЪВУДбљЃЌЖјЪЧдкРэНтУПвЛИіЯёЫиЕНЕзДњБэЖрЩйЯрЮЛЁЃ
етОЭЩцМАЕНвЛИіЬиБ№ШнвзЗГЕЕФЮЪЬтЃКЯрЮЛЗЖЮЇгГЩфЁЃБШШчФуЕФЯрЮЛЭМЩшМЦЪББОРДЖдгІЕФЪЧ 0 ЕН 2πЃЌЕЋЕМШыЪБФужЛЩшжУГЩСЫ 0 ЕН πЃЌФЧУДНсЙћБиШЛЪЇецЁЃПДЦ№РДжЛЪЧВЮЪ§ЬюДэСЫвЛЕуЕуЃЌЪЕМЪЩЯећИіВЈЧАЕїжЦЖМБфСЫЁЃЫљвдетРявЛЖЈвЊИљОнФуЯрЮЛЭМдЪМБрТыЗНЪНЃЌе§ШЗЩшжУзюаЁжЕКЭзюДѓжЕЁЃКмЖрDOEбщжЄЗГЕЃЌВЛЪЧЫуЗЈВЛааЃЌЖјЪЧетвЛВНЮяРэСПгГЩфГіСЫЮЪЬтЁЃ
ЕкШ§ВНЃЌАбЯрЮЛЪ§ОнБфГЩеце§ЕФЭИЙ§ТЪКЏЪ§
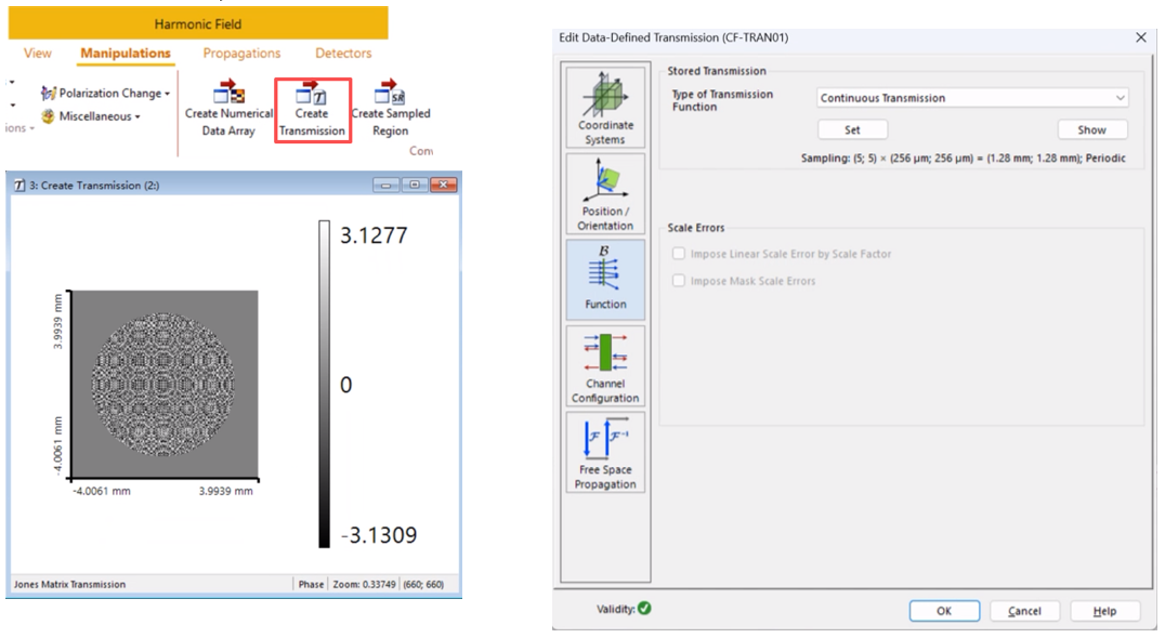
ЕМЭъЯрЮЛЭМжЎКѓЃЌЛЙУЛЭъЁЃвђЮЊФуЯждкФУЕНЕФЃЌЛЙЪЧвЛИіДјгаЮяРэаХЯЂЕФЪ§ОнЖдЯѓЃЌЫќЛЙВЛЪЧвЛИіеце§ФмЗХНјЯЕЭГРяЕїЙтЕФ“ЦїМў”ЁЃЫљвдНгЯТРДвЊзіЕФЃЌОЭЪЧбЁжаетИі Harmonic FieldЃЌШЛКѓЕуЛїДДНЈ TransmissionЁЃетвЛВНБОжЪЩЯОЭЪЧдкзівЛМўЪТЃК Аб“ЯрЮЛЗжВМ”зЊЛЏГЩ“ЖдЙтГЁгаЕїжЦзїгУЕФЭИЙ§ТЪКЏЪ§”ЃЌШчЭМ4зѓЭМЫљЪОЁЃ
ЭМ4. ДгHarmonic FieldДДНЈTransmission(зѓ)КЭНЋTransmissionЕМШыData-Defined Transimission(CF-TRAN01)(гв)
ЕкЫФВНЃЌАбЭИЙ§ТЪКЏЪ§ШћНј Data-Defined Transimission(CF-TRAN01) Ря
РДЕНзюЙиМќЕФвЛВНЃКАбИеВХЩњГЩЕФЭИЙ§ТЪКЏЪ§ЕМШы Data-Defined Transimission(CF-TRAN01) жаЃЌШУЫќе§ЪНГЩЮЊетИідЊМўЕФЕїжЦФкШнЃЌШчЭМ3гвЭМЫљЪОЁЃЕНетРяЃЌData-Defined Transimission(CF-TRAN01) ОЭВЛдйЪЧвЛИіПеПЧСЫЃЌЖјЪЧБфГЩСЫвЛИігЩФуЕФЯрЮЛЭМЖЈвхГіРДЕФDOEЦїМўЁЃ
етвЛВНКУгУЕФЕиЗНЃЌВЛНіНідкгк“ЕМШыГЩЙІ”ЁЃИќДѓЕФМлжЕдкгкЃЌData-Defined Transimission(CF-TRAN01) ЭЈГЃЛЙжЇГжЖдСЌајЯрЮЛЭМзіЖрЬЈНзСПЛЏДІРэЁЃвВОЭЪЧЫЕЃЌФуПЩвддкетРяНјвЛВНФЃФтЯжЪЕЙЄвеЁЃ
ЮЊЪВУДетКмживЊЃПвђЮЊРэЯыжаЕФDOEЭЈГЃЪЧСЌајЯрЮЛЃЌЖјЪЕМЪМгЙЄГіРДЕФЃЌЭљЭљЪЧгаЯоЬЈНзЃЌБШШчЖўжЕЁЂЫФЬЈНзЁЂАЫЬЈНзЁЂЪЎСљЬЈНзЕШЕШЁЃЬЈНздНЩйЃЌЖдРэЯыВЈЧАЕФБЦНќЭЈГЃдНВюЃЌбмЩфаЇТЪЁЂОљдШадЁЂБГОАдыЩљЖМПЩФмЪмгАЯьЁЃЫљвдШчЙћФужЛбщжЄСЌајЯрЮЛЃЌФЧФуЕУЕНЕФЪЧРэТлзюгХБэЯжЃЛ ШчЙћФуНјвЛВНбщжЄСПЛЏЯрЮЛЃЌФуПДЕНЕФВХИќНгНќЪЕМЪТфЕиБэЯжЁЃетвЛВуВюБ№ЃЌЭљЭљОіЖЈСЫвЛИіЗНАИЕНЕзФмВЛФмецЕФзпЕНжЦдьЁЃ
ЕкЮхВНЃЌХмЦ№РДЃЌПДНсЙћЫЕЛА
зюКѓЃЌАбМЦЫув§ЧцЩшжУЮЊГЁзЗМЃЃЌбЁКУКЯЪЪЕФДЋВЅЫузгЃЌШЛКѓдЫааЁЃЮЊЪВУДетРяЭЦМіГЁзЗМЃЃПвђЮЊDOEБОжЪЩЯЪЧЖдЙтГЁЯрЮЛНјааОЋЯИЕїжЦЃЌзюжеФуЙиаФЕФЪЧОЙ§ДЋВЅжЎКѓЃЌФПБъУцЩЯЕФеёЗљКЭЯрЮЛдѕУДбнЛЏГЩФПБъЙтАпЁЃГЁзЗМЃЗНЗЈдкетРрЮЪЬтЩЯЗЧГЃКЯЪЪЃЌФмЙЛБШНЯЭъећЕиБЃСєВЈЖЏЙтбЇаХЯЂЁЃ
ЗТецНсЪјКѓЃЌжБНгПДЬНВтЦїЩЯЕФЙтАпЗжВМЁЃ
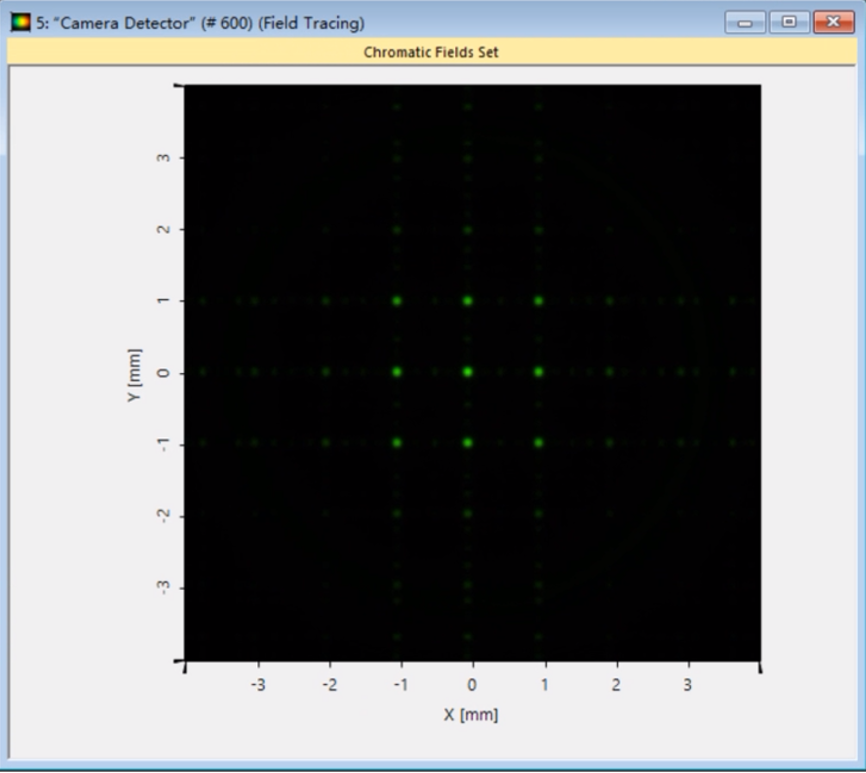
етИіАИР§РяЃЌзюжеПДЕНЕФЪЧвЛИіБШНЯЧхЮњЕФ 3×3 ЕуеѓЃЌШчЭМ5ЫљЪОЁЃвВОЭЪЧЫЕЃЌетеХЩшМЦКУЕФЯрЮЛЭМЃЌОЙ§ Data-Defined Transimission(CF-TRAN01) МгдиВЂЭъГЩздгЩПеМфДЋВЅжЎКѓЃЌГЩЙІАбШыЩфИпЫЙЙтећаЮГЩСЫФПБъЭМбљЁЃЕНетРяЃЌетИіDOEЩшМЦжСЩйЭъГЩСЫзюЛљДЁвВзюживЊЕФвЛЯюбщжЄЃК ЫќШЗЪЕ“зіГіСЫЯызіЕФЪТ”ЁЃ
ЭМ5. ОЙ§DOEећаЮКѓЩњГЩЕФ3×3ЕуеѓЭМ
ЮхЁЂПДЕН 3×3 ЕуеѓЃЌОЭЫуНсЪјСЫТ№ЃП
ЦфЪЕЛЙВЛЙЛЁЃКмЖрШЫЕквЛДЮзібщжЄЪБЃЌжЛвЊПДМћОХИіЕуГіРДСЫЃЌОЭЛсЯТвтЪЖОѕЕУЃКГЩСЫЁЃЕЋШчЙћФуеОдкИќЙЄГЬЛЏвЛЕуЕФНЧЖШЃЌХаЖЯвЛИіDOEЩшМЦКУВЛКУЃЌдЖВЛжЙ“гаУЛгаЗжГіРД”етУДМђЕЅЁЃжСЩйЛЙгІИУМЬајПДМИИіЮЪЬтЁЃ
ЕквЛЃЌОХИіЕуЕФЮЛжУзМВЛзМЃП ЪЧВЛЪЧдкФудЄЦкЕФЮЛжУЩЯЃП ЕугыЕужЎМфЕФМфОрЖдВЛЖдЃП ШчЙћЮЛжУХмЦЋСЫЃЌФЧПЩФмВЛЪЧЩшМЦБОЩэДэСЫЃЌвВПЩФмЪЧДЋВЅОрРыЁЂВЩбљЩшжУЛђепЕМШыгГЩфГіСЫЮЪЬтЁЃ
ЕкЖўЃЌФмСПОљВЛОљдШЃП ОХИіЕуЪЧВЛЪЧВюВЛЖрССЃП ЛЙЪЧжаМфЬиБ№ССЁЂБпЩЯЬиБ№АЕЃП ЖдгкКмЖргІгУРДЫЕЃЌОљдШадЩѕжСБШ“ЗжГЩМИИіЕуИќживЊЁЃ
ЕкШ§ЃЌБГОАИЩВЛИЩОЛЃП ФПБъЕуеѓжЎЭтЃЌЪЧВЛЪЧЛЙгаУїЯддгЩЂЙтЁЂЙэЯёЁЂЭЯЮВЛђепдыЩљЕзЃП вЛИіеце§КУгУЕФDOEЃЌВЛФмжЛЛсЩњГЩФПБъЃЌЛЙЕУОЁПЩФмбЙзЁЗЧФПБъЁЃ
ЕкЫФЃЌСПЛЏжЎКѓЛЙЮШВЛЮШЃП СЌајЯрЮЛЯТаЇЙћКмКУЃЌВЛДњБэЬЈНзЛЏжЎКѓвВКУЁЃ ШчЙћСПЛЏКѓадФмЕєЕУКмУїЯдЃЌФЧЫЕУїетИіЩшМЦЖдЙЄвеЬиБ№УєИаЃЌТфЕиЗчЯеОЭЛсБШНЯДѓЁЃ
ЫљвдЃЌЗТецбщжЄетМўЪТЃЌеце§ЕФвтвхВЛЪЧНиЭМвЛеХНсЙћЭМЃЌЖјЪЧНшжњНсЙћЭМШЅХаЖЯЃК етИіЩшМЦЃЌЕНЕзЪЧПДЦ№РДВЛДэЃЌЛЙЪЧецЕФжЕЕУзіЁЃ
СљЁЂЮЊЪВУДетИіЗНЗЈЬиБ№ЪЪКЯЙЄГЬбщжЄЃП
ЮвздМКОѕЕУЃЌетИіЗНЗЈзюгаМлжЕЕФЕиЗНЃЌВЛдкгкЫќЖрьХЃЌЖјдкгкЫќЬиБ№НгЕиЦјЁЃвђЮЊецЪЕЯюФПРяЃЌЮвУЧОГЃгіЕНЕФЧщПіЪЧЃКЯрЮЛЭМвбОгаСЫЁЂ ЪБМфКмНєЁЂгжВЛЯыжиаТДгЭЗНЈИДдгФЃаЭЁЂЛЙЯЃЭћОЁПьжЊЕРетИіЗНАИжЕВЛжЕЕУМЬајЭЦНјЁЃетЪБКђЃЌData-Defined Transimission(CF-TRAN01) етЬзСїГЬОЭЬиБ№ЫГЪжЁЃЫќЕФгХЪЦКмУїЯдЃК
ЕквЛЃЌЩЯЪжПьЁЃ ЖдвбгаЯрЮЛЭМЕФЩшМЦРДЫЕЃЌВЛашвЊФуДгСудйНЈЙЙЦїМўЁЃ
ЕкЖўЃЌЯЮНгздШЛЁЃ КмЖрDOEЫуЗЈЪфГіЕФБОРДОЭЪЧЭМЦЌИёЪНЛђепЯрЮЛЗжВМЮФМўЃЌжБНгОЭФмЭљЯТзпЁЃ
ЕкШ§ЃЌНсЙћжБЙлЁЃ ФПБъУцЩЯЕНЕзГЄЪВУДбљЃЌЬНВтЦївЛПДОЭжЊЕРЁЃ
ЕкЫФЃЌЛЙФмПМТЧжЦдьвђЫиЁЃ ЭЈЙ§ЯрЮЛСПЛЏЃЌПЩвдАббщжЄДг“РэЯыЪРНч”РЛи“ЯжЪЕЪРНч”ЁЃ
ЕкЮхЃЌЪЁГЩБОЁЃ КмЖрПгЃЌдкЗТецНзЖЮВШЕєЃЌзмБШдкСїЦЌЛиРДжЎКѓВШвЊБувЫЕУЖрЁЃ
змЖјбджЎЃЌетИіЗНЗЈзюДѓЕФвтвхЃЌОЭЪЧШУDOEПЊЗЂВЛдйФЧУДЯё“ПЊУЄКа”ЁЃ
ЦпЁЂзмНс
етИіАИР§ЫфШЛжЛЪЧвЛИі 3×3 ЗжЪјDOEЃЌЕЋЫќКмКУЕиЫЕУїСЫвЛМўЪТЃКDOEЩшМЦДгРДВЛЪЧЯрЮЛЭМГіРДОЭНсЪјСЫЃЌЖјЪЧЯрЮЛЭМГіРДжЎКѓЃЌбщжЄВХеце§ПЊЪМЁЃЭЈЙ§ VirtualLab Fusion ЕФ Data-Defined Transimission(CF-TRAN01)ЃЌФуПЩвдАбЩшМЦКУЕФЯрЮЛЭМПьЫйзЊГЩПЩМЦЫуЕФDOEФЃаЭЃЌдйНсКЯГЁзЗМЃШЅПДФПБъЦНУцЕФецЪЕЙтАпЗжВМЁЃетбљвЛРДЃЌВЛНіФмХаЖЯЩшМЦЪЧЗёДяЕНСЫдЄЦкЃЌЛЙФмНјвЛВНЦРЙРСПЛЏЬЈНзЁЂДЋВЅЬѕМўКЭЦїМўадФмжЎМфЕФЙиЯЕЁЃ
ЖдгкЙЄГЬПЊЗЂРДЫЕЃЌетвЛВНЗЧГЃжЕЁЃвђЮЊЫќАяФуАбКмЖрБОРДвЊдкжЦдьжЎКѓВХБЉТЖЕФЮЪЬтЃЌЬсЧАХВЕНСЫЗТецНзЖЮЁЃЖјетЃЌЧЁЧЁОЭЪЧЙтбЇЗТецзюУдШЫЕФЕиЗНЃК ВЛЪЧЬцФуЛвЛеХЭМЃЌЖјЪЧЬцФудкеце§ЭЖШыГЩБОжЎЧАЃЌЯШАбЗчЯеПДМћЁЃШчЙћФуЪжРявВгавЛеХDOEЯрЮЛЭМЃЌЛЙУЛбщжЄЙ§ЃЌФЧЮвецЕФНЈвщФуЪдвЛДЮЁЃКмЖрЪБКђЃЌвЛДЮЗТецЪЁЯТРДЕФЃЌВЛжЛЪЧМгЙЄГЩБОЃЌИќЪЧећИіЯюФПЗДИДЪдДэЕФЪБМфЁЃ
|